![]()
Vorwort:
Wichtig ist hier zu verstehen, das jegliche Konvertierungen eines 2D Bildes zu
einen 3D Bild unter umständen mit mehreren Arbeitsschritten
verbunden, denn eine Automatik kann nicht alle Bildsituationen erfassen und
entscheiden was mit dem Inhalt zu tun ist.
Die moderne Echtzeitumwandlung funktioniert zwar erstaunlich, jedoch gibt es Bildinhalte die zur korrekten Umsetzung vorher um "coloriert" werden müssen.
Danach kann man das neu aufgesetzte Signal umrechnen lassen und zum Schluss in einem letzten Schritt ein erneuertes "Colorgrading" aufsetzen.
Zur Zeit gibt es sehr billige Lösungen und sehr teuere, die Unterschiede sind aber dementsprechend ebenfalls deutlich zu unterscheiden.
Einfache Berechnungen angefangen von einer simplen Rechts-Linksverschiebung des
Bildes bis zur einer einfachen Wölbung des Bildes bewirken einen
Tiefeneffekt der aber wenig mit der Berechnung eines Stereoskopischen Bildes zu
tun hat.
Hier nun ein komplexes "Realtime" System den genauen Algorithmus kann ich hier nicht aufführen, dieser ist ein Firmengeheimnis.
|
Echtzeit-Berechnung --- Was heißt das? |
Will man ein Stereoskopisches Bild berechnen muss lediglich einen
zweiten Kanal neu aufbauen, den original Kanal behält man bei. Da nur ein paar Zeilen notwendig sind, kann man hier von einer Echtzeitwandlung sprechen.
|
|
|
Analyse der Detailvielfalt und Bildung einer Tiefenmappe |
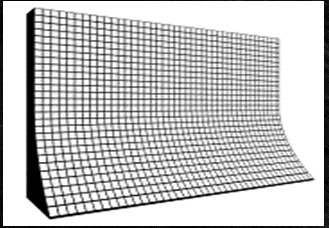
Fangen wir mit einer einfachen Bildinformation an hier als Beispiel
einfache Landschaftaufnahme, wenig
Da der Inhalt wenig aussagt und wie bei unserem natürlichen sehen in der ferne kein 3D sehen mehr möglich ist (Augenabstand zu gering 65mm) wird auch hier die Tiefenebene sehr flach berechnet. Es entsteht daher eine "Mapping" Struktur wie abgebildet.
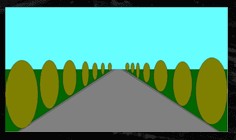
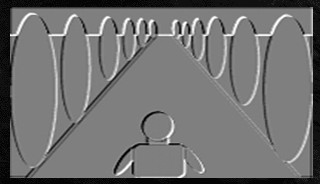
Gehen wir nun davon aus das sich der Horizont nur wenig ändert aber dafür mehr Details in der vorderen Bildbereich mehr Details zur Verfügung stehen hier in der
Anhand der Information müssen wir nun das Mapping verändern, hier bildet sich eine Bildsituation die sich von der Seite Vordergrund bis Unendlich zur Bildmitte hinzieht. Entsprechend formen wir nun das Hintergrundmapping:
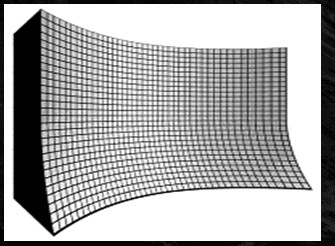
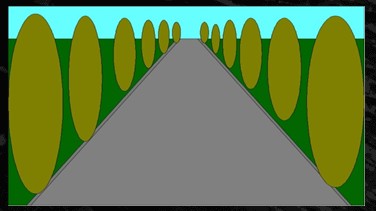
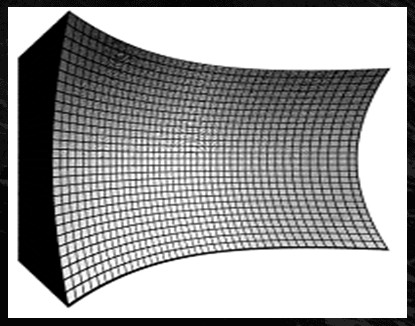
In der hier letzten angenommen Bildsituation, erhalten wir sehr viele Details, der Horizont spielt hier keine Rolle mehr:
Zur Bildung des "Mappings" gleicht die Bildanordnung einer Hohlkehle die
wir nach berechnen werden.
Hier endet unsere Tiefenberechnung, wir haben hier schon mehr Details berechnet als es einfache Systeme tun würden. Das reicht uns aber noch
nicht, zwar haben wir jetzt einen dynamischen Tiefeneindruck, jedoch
sind die Objekte in dieser Form alle einfach mit in die Tiefe gelegt,
hier fehlt uns also noch die Berechnung der Objekte zu einander.
|
|
|
Erkennung der Objekte und deren Platzierung im Bild
|
Nun um die Objekte im Abstand zu berechnen , müssen wir an einem Punkt X anfangen, daher wird sich auch eine Fehlermöglichkeit einschleichen, die sich aber auch nicht ausschließen lässt. Wenn man diese möglichen Berechnungsfehler kennt, kann man durch Bearbeitung des Eingangsmateriales dem entgegen wirken. Nun wo liegt denn unser Anfangspunkt:
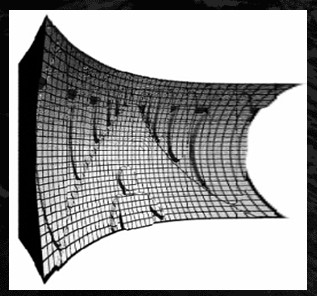
Unser Startpunkt wird durch die Objektfarbe bestimmt, unsere Annahme: Kalte Farben = liegen Tiefer Warme Farben = liegen im Vordergrund Nun können sie sich sicherlich vorstellen das dies nicht immer der Fall ist und somit hier auch der Berechnungsfehler entsteht, Beispiel: Schwarzer Rennwagen auf grauem Asphalt und der Rennwagen hat eine Rote Wagennummer oder Logo. Fazit das Logo liegt abseits des Rennwagens. Dies sind aber nun mal Bedingungen die man in Kaufnehmen muss, die Bildberechnung kann hier wir bereits erwähnt verbessert werden, wenn man an dem Rennwagen Logo durch "Colorgrading" im Vorfeld entgegenwirkt. Nichts desto trotz sind die Ergebnisse in 80% der Eingangssignale bemerkenswert. Nun die Delektierung der Farbe ist eine Sache, sie muss jetzt noch in Relation zur Bildmappe gesetzt werden. Wir tun dies in dem wir eine Art negative Maske bilden und durch einem EMBOSS Prozess die Distanz zwischen den Objekten und zur Bildmappe bestimmen.
Die Intensität lässt sich einstellen (Sub-Intensity) , dieses Emboss Signal wird nun auf die Bildmappe gelegt:
Bitte bedenken sie, dies geschieht alles Zug um Zug also Zeilenpaar für Zeilenpaar, also Echtzeit.
|
|
|
Das sollte man beachten ! |
Also 80% wird wahrscheinlich nahe zu perfekt funktionieren, ein
anderer Teil so in etwa, und wiederum ein anderer Teil überhaupt nicht.
Nun die Elektronik kann eben nicht eine menschliche Entscheidung
treffen. Wenn man jedoch diese Bedingungen kennt kann man diesen entgegensteuern - Trotz diesem Prozess sparen sie eine riesige Menge an Produktionskosten. Besonders werden Ihre Produktionen interessant dadurch das sie zum Beispiel Historien Material in Ihre Stereoproduktion mit einbinden können. Weniger ist mehr: Denken Sie daran, wenn sie etwas auf einem kleinen Bildschirm produzieren in Stereo und diese dann evtl. auf einer Großbildwand projizieren wollen , verändern sich die Winkel, daher sind ihre Effekte evtl. übertrieben und nicht mehr erfassbar. Umgekehrt wirken die spezial Effekte von der Leinwand auf einem Display nicht mehr so spektakulär ! Eine Konvertierung von 2D nach 3D kann keine reale Stereoproduktion ersetzen ist jedoch ein hilfsreiches Tool. |
|
|
Positive und Negative Parallaxe |
Hier nur ein kurzer Hinweise, mehr hierzu in einem anderen Bereich
meiner Seite: Die Berechnung von 2D nach 3D erfolgt ausschließlich in der positiven Parallaxe, heißt Bild startet am Bildschirm nach hinten, kein Effekt nach vorne ! Auch wenn´s die meisten erwarten erwarten, für nicht ist es das schlechteste Stereo wenn Objekte aus dem Bildschirm oder Leinwand heraus kommen, denn es bedeutet sehr viel Stress für sehen, als Gag ja aber bitte nur kurz. |
|
|
Wie kann man einen 2D3D Bildprozessor mit Gewinn einsetzen ? |
Beispiele: A) Umwandlung von historischem Bild Material und Einbindung in eine echte Stereoproduktion . Mehr Produktionen, erheblich geringere Produktionskosten. B) Bei Livesport Events, hierzu kann das Signal eine normalen Kamera vom Spielfeldrand in ein 3D Signal gewandelt werden, die Stereowirkung ist hier meist besser als von einem echten Stereorigg wegen der weiten Bildraumdistance Fussballfeld ! Einsparung von teuerem Stereorigg, der Prozessor kann nach dem Mischer liegen sodaß mehrer Kameras von einem Prozessor bedient werden können. Aber Achtung, dies funktioniert nicht wenn die TOP Kamera verwendet wird, da sie hier nur einen kompletten grünen Hintergrund ohne Details aufnehmen, hier kann keine Bildberechung durchgeführt werden ! C) Musikshows - durch die zum Teil sehr Farbenfrohen Bildinformation kann man fast 1:1 direkt das Material umsetzen. Ohne weitere Bearbeitung umsetzbar. D) Erotikfilme - kein Problem ! Echt neue Möglichkeiten ! Komplett neue Geschäftsmöglichkeiten, auch gegen die Internet-Erotik. E) Bilder da zur Berechnung kein bewegtes Bild notwendig ist, lassen sich auch Bilder und Graphiken leicht umsetzen. Keine langen Handbearbeitung notwendig, bzw. Basis zur Manualbearbeitung = Zeitersparnis |
|